An innovative algorithm enables the safe transport of curved surgical needles to "hidden" tissues
Researchers from the Technion and the University of North Carolina (UNC) developed An algorithm that guides surgical needles in curved XNUMXD trajectories. The researchers - Dr. Oren Salzman from the Taub Faculty of Computer Science at the Technion and Prof. Ron Eltrovich and Mangio Fu from North Carolina - Publish the development At the prestigious Robotics: Science and Systems conference that was recently held online.
Many medical procedures, such as biopsy and targeted delivery of anti-cancer drugs to tumors, require the transportation of a needle inside the tissue. Straight needles can "do the job" in case the road Hi Sarah from the point of entry to the target tissue does not pass through vulnerable tissues; However, in many cases, the target tissue "hides" behind some vulnerable bone or tissue, and then the surgeon is required to bypass the obstacle - a difficult and complex task, certainly when it comes to vulnerable and sensitive areas.
In recent years, on this background, needles with a beveled tip, controlled by pushing and rotating the base of the needle, have been developed. The problem is that the orientation of such needles is not simple and intuitive, and their manual management involves many risks. To this end, "algorithms for motion planning" were developed, the purpose of which is to direct the needle accurately and safely. These algorithms demonstrate impressive capabilities, and yet, since these are invasive processes, the precision required is very high, otherwise these systems will not receive regulatory approval.
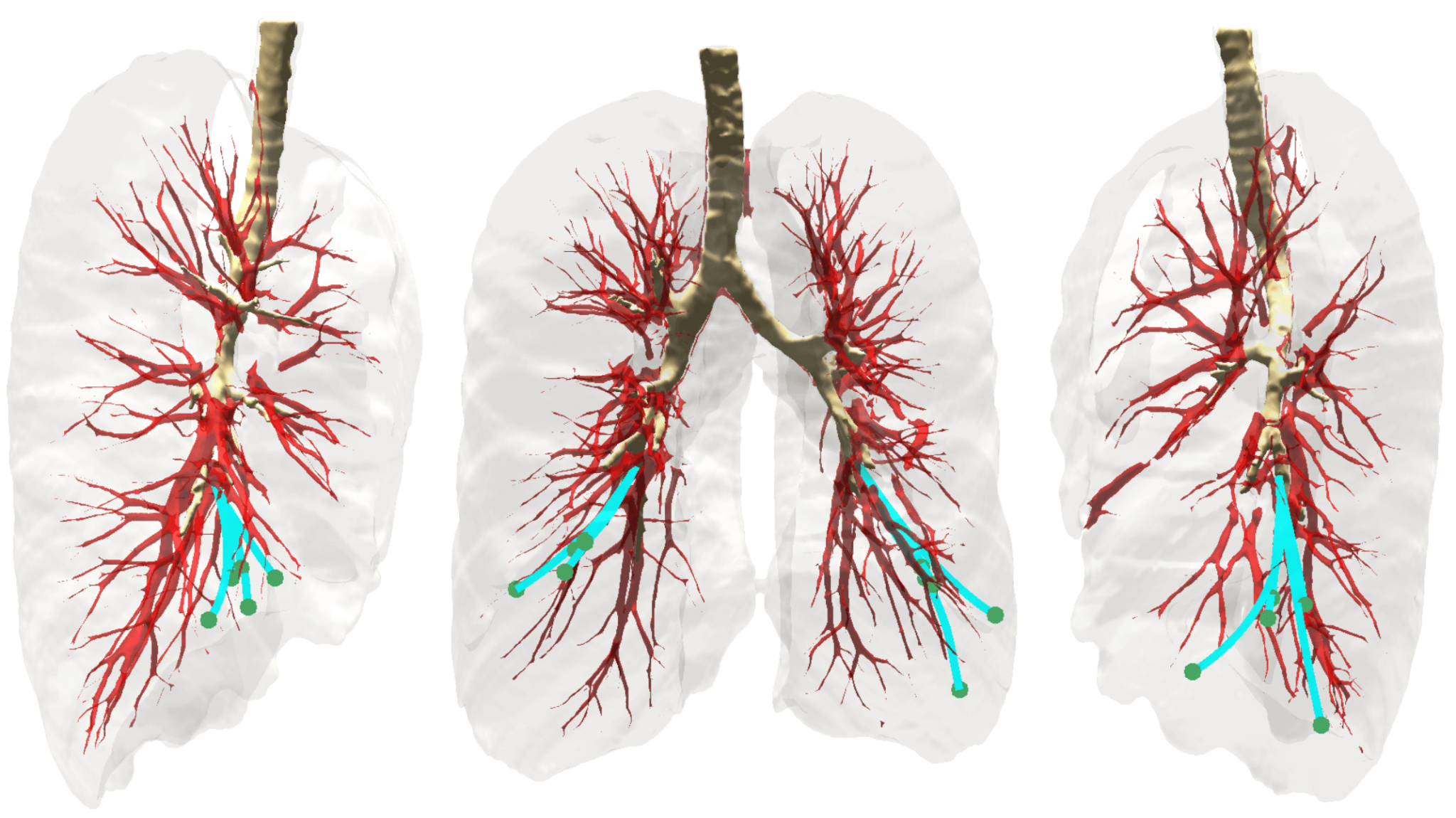
The development presented by the two researchers at the conference is an innovative motion planning algorithm for steerable needles, and it illustrates the importance of computer science in solving problems related to medicine and biomedical engineering. The new algorithm calculates for the needle, based on relevant scans such as MRI or CT, the optimal route that will lead it to the target while avoiding hitting various anatomical obstacles. Unlike existing algorithms, this algorithm provides a "guarantee" that the needle will not damage these tissues; In the event that such a safe entry is not possible, he will warn about it. Furthermore, it calculates the route at a relatively high speed compared to competing algorithms and with higher success rates. According to the researchers, the technology presented at the conference constitutes a new algorithmic paradigm (new algorithmic foundation) that is expected to lead to additional applications in the management of surgical needles.
Dr. Oren Salzman joined the Technion faculty in the summer of 2019 after a post-doctorate at the Robotics Institute at Carnegie Mellon University. He is the head of the Computational Robotics Laboratory (CRL) at the Taub Faculty of Computer Science. The current research was supported by the American Institutes of Health (NIH), the Israeli Ministry of Science and Technology and the US-Israel Binational Science Foundation (BSF).
More of the topic in Hayadan:
